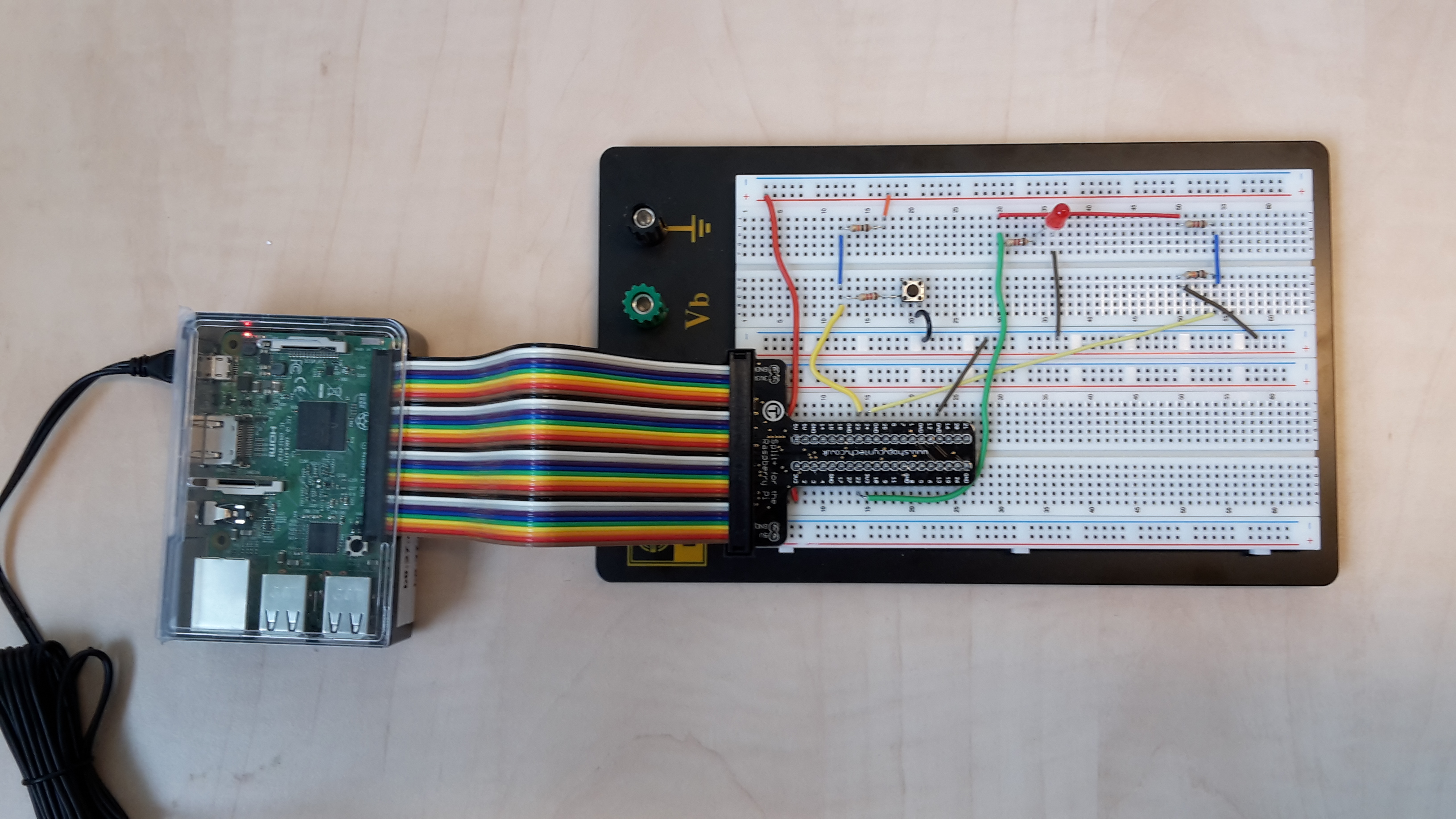
Raspberry Pi
with breadboard
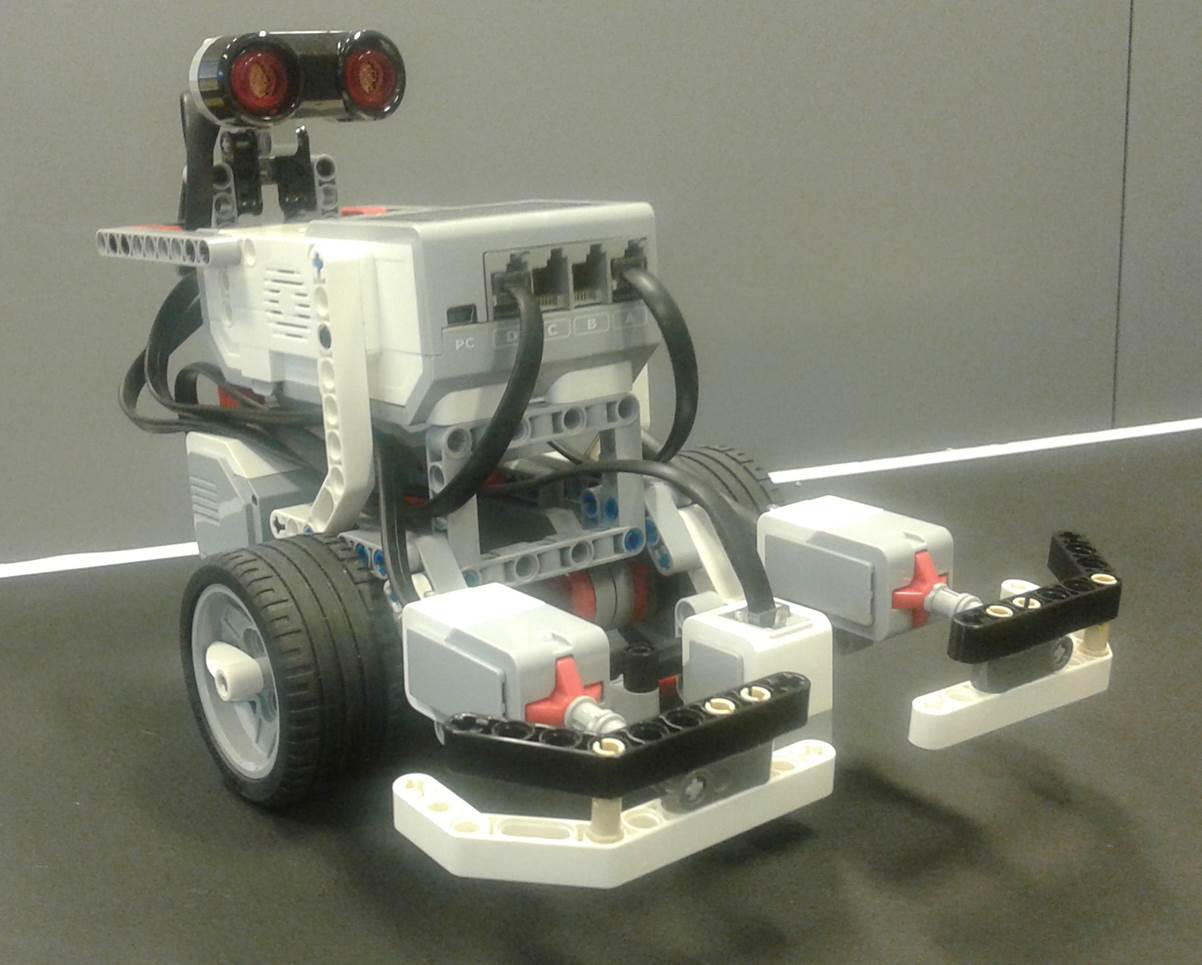
Small Lego EV3 Rover
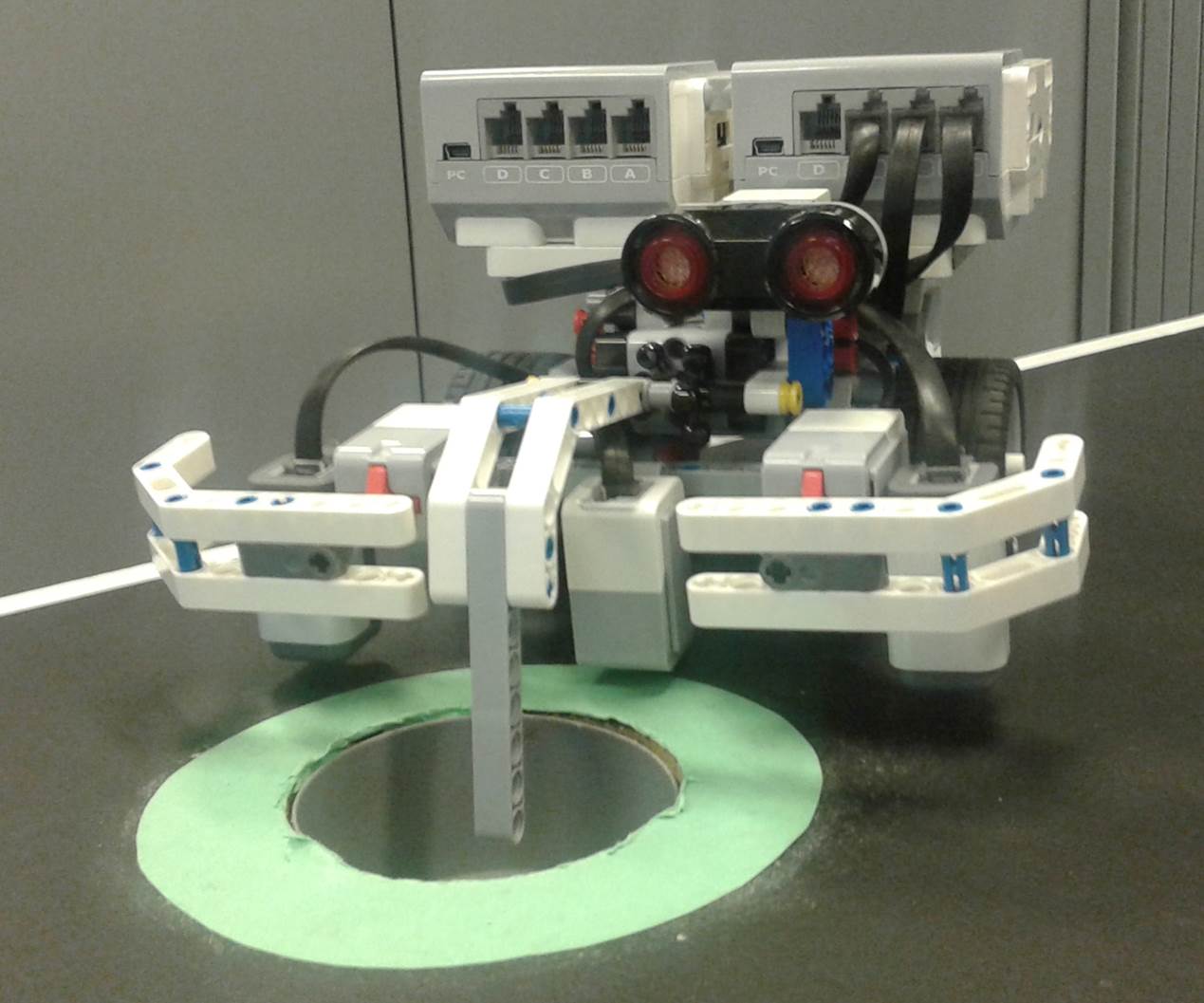
Lego EV3 Mars Rover
General aim of this course is to acquire basic knowledge about the systematic design of embedded systems and to obtain practical experience with model-based development of such systems. Relevant topics are, for instance, timing, real-time operating systems (and experience with Real-Time Linux), scheduling, interface of software with sensors and actuators, and model-based development of a small distributed real-time application using a Domain Specific Language.
General outline: The course will consist of two main parts (in both parts, students work in groups of two):
|
Raspberry Pi with breadboard |
Small Lego EV3 Rover |
Lego EV3 Mars Rover |